欢迎光临~2024澳门2024免费原料网1273

0373-54338880373-7022565
0373-54338880373-7022565

更新日期:2018-12-12 13:52:13
注塑制品脱模时,对一些人工脱模不便、形状复杂、薄壁的、易碎的、外观要求特虽高的注射制品,已越来越多地采用机械手。设计时,要考虑适当的夹持方式(机械夹持或气吸)、夹持质量、夹持压力、取出时的运动轨迹(一般由水平、垂直和回转三部分组成)、动作速度和行程、对位置重复精度等要求。
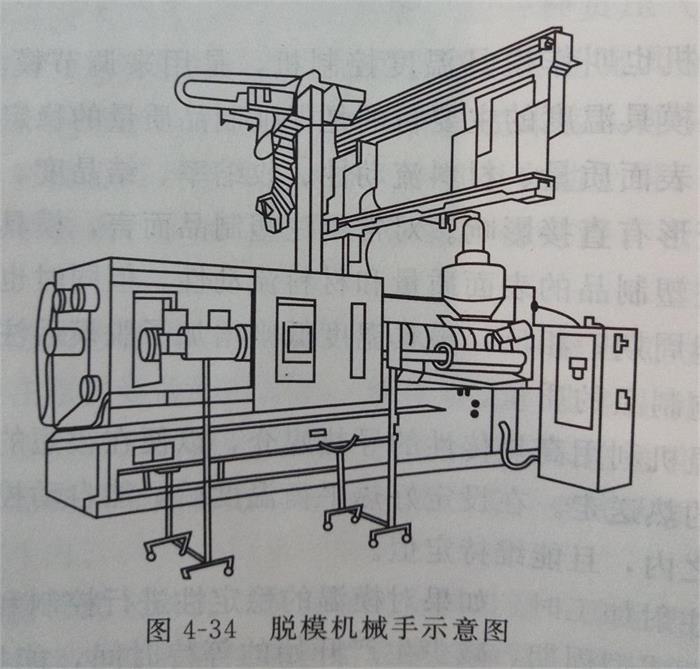
在机械手使用中,最重要的是与注射机的动作配合问题。主要注意以下几个问题:
1、机械手离开模具后,机械手与注射机应能够各自继续动作,以缩短成型周期;
2、在选择机械手时,应考虑物品的夹持要求;
3、机械手运动速度越快,则越容易产生振动,要考虑机械手产生的惯性振动,能否被注射机合模机构所吸收。
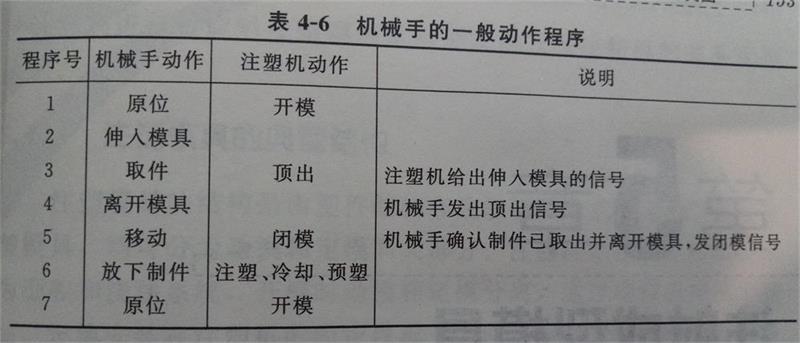
机械手的一般动作程序如表所示。
目前常见的机械手有两类:一类是用交流伺服电机驱动;另一类是用气动式机械手。
销售经理:18337377787
采购经理:0373-7022565
电 话:0373-5433888
传 真:0373-5433868
地 址:新乡市宏力大道西贾桥工业区12号
备案号:豫ICP备16026643号-1
